I. Frottement statique
Le frottement statique est une force FFS qui empêche un mouvement de démarrer. C’est lui qui nous permet, en s’appuyant sur le sol, d’avancer et de tenir la route dans un virage.
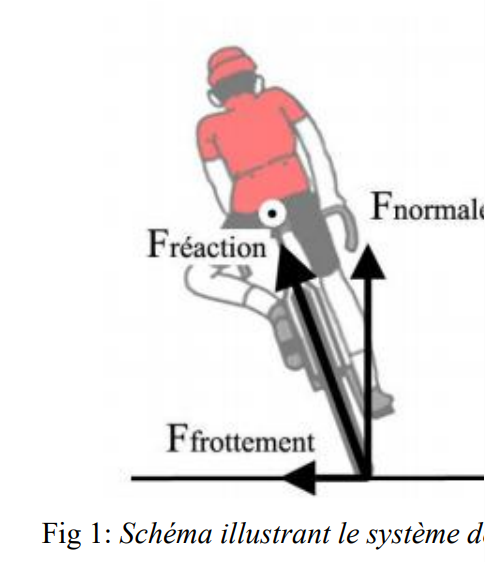
La bicyclette se déplace vers l’avant quand le pneu arrière pousse sur la route, vers l’arrière, grâce au frottement. Par réaction, le sol pousse le pneu vers l’avant, et par la suite le vélo et son cycliste. Le frottement statique n’est pas consommateur d’énergie puisqu’il ne s’accompagne d’aucun déplacement (le travail est égal à une force multipliée par une distance) sauf en cas de dérapage, mais l’on parle alors de frottement cinétique.
La force maximale de frottement statique FFSmax, au-delà de laquelle il y a glissement, est proportionnelle à la force normale FN (sur laquelle nous allons revenir ci-dessous) selon un coefficient de frottement statique µs dépendant des deux matériaux en contact.
FFSmax = µs × FN
1. Le coefficient de frottement statique µs
Prenons l’exemple du frottement statique entre la route et les pneus. Le premier matériau est le goudron de la route, ou la terre et les cailloux du chemin. Il y a différentes textures du bitume ou qualités du chemin. Le deuxième matériau est le pneu. Ses propriétés varient selon la gomme, la chape…
Dans ce domaine, le choix est infini. De plus, l’état d’un matériau peut changer selon les circonstances. Le coefficient de frottement statique d’un pneu sur du bitume sec est plus élevé que celui d’un pneu sur du goudron mouillé. Il l’est encore moins si la route est verglacée ou peinte et humide comme sur les passages pour piétons.
FFSmax est indépendante de la valeur de la surface de contact entre deux corps solides. Donc, entre le goudron et le pneu que l’on assimile à un corps solide. À qualité de gomme égale, la tenue de route n’est pas meilleure avec des pneus de 70, de 65 ou de 26 pouces, avec des pneus de faible section ou des gros boudins.
2 La force normale FN
La force exercée par la route sur le cycliste et son vélo est appelée force de réaction Froute. Elle part du point de contact entre la route et les deux pneus. Dans un plan orthogonal à la trajectoire, on peut décomposer Froute en deux forces : La première force est la force normale FN qui est perpendiculaire à la route. Si la surface de la route est horizontale, la force normale est verticale. Elle est alors, répartie sur les deux roues, égale et opposée à la force du poids FP de la bicyclette et du cycliste, par définition toujours verticale. La deuxième force est tangente à la surface. C’est une force de frottement. Elle est nulle sur une route horizontale dans une trajectoire rectiligne. Dans un virage, elle est dirigée vers l’intérieur de la courbe. C’est elle qui s’oppose au glissement du pneu. La force de réaction de la route est liée au poids du cycliste et du vélo et augmente avec lui. Donc, plus le cycliste est lourd ou chargé, plus la force maximale de frottement statique est élevée.
3 Frottement cinétique
Le frottement cinétique est la force qui tend à freiner un corps glissant sur une surface. Cette force FFC est égale et de sens opposé à la force motrice nécessaire pour maintenir le corps en mouvement uniforme. Elle est donnée par la formule FFC = µc × FN, dans laquelle µc est le coefficient de frottement cinétique.
Le frottement cinétique est habituellement inférieur au frottement statique. Cela veut dire qu’il faut une force plus grande pour vaincre l’adhérence (due au frottement statique) que pour entretenir le glissement consécutif à la perte d’adhérence.
Nous avons tous constaté qu’il fallait lâcher les freins au fur et à mesure que la vitesse diminuait, pour ne pas s’arrêter brutalement ou voir une roue déraper. Parce qu’il y a mouvement, les frottements cinétiques, contrairement aux frottements statiques, consomment de l’énergie du cycliste et la transforment en énergie thermique. Les pièces en frottement l’une contre l’autre chauffent, nous le savons d’expérience
II. Lois empiriques du frottement
Amontons, en 1699, puis Coulomb, en 1780, ont été les premiers à formuler les lois du frottement solide que nous connaissons actuellement. Les lois d’Amontons se résument en deux postulats: La force de frottement Ft est indépendante de la surface apparente de contact. La force de frottement Ft est proportionnelle à la charge normale appliquée Fn. La première loi d’Amontons montre qu’il n’y aura pas de glissement entre deux solides en contact, tant que la force tangentielle Ft, nécessaire pour déplacer le solide, est inférieure à une force minimale Fs. Lorsque la force tangentielle atteint cette valeur seuil, le solide glisse.
Fs = μs Fn
μs est appelé coefficient de frottement statique. Une fois le solide mis en mouvement, une force Fd est nécessaire pour maintenir le glissement à vitesse constante. L’expérience montre que cette force est également proportionnelle à la charge normale appliquée:
Fd = μd Fn
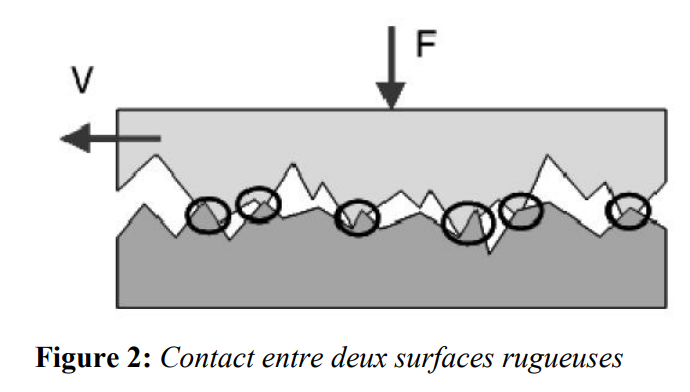
μd définit le coefficient de frottement dynamique. Bowden et Tabor dans les années 50, proposent une explication tenant compte de l’effet de la rugosité des surfaces en contact (Figure 2) paramètre non considéré dans la théorie d’Amontons –Coulomb.
III. La déformation élastoplastique des aspérités
Le coefficient de frottement est lié à la rugosité initiale des surfaces pendant un certain temps, appelé période de rodage. Ceci s’explique par les déformations élastique et plastique des aspérités dans le sens du mouvement qui résultent du mouvement relatif des deux surfaces rugueuses. J.A. Greenwood & al. ont défini un indice de plasticité ψ qui est donné par la relation suivante :
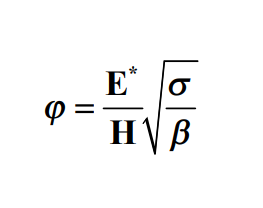
ψ : Indice de plasticité
H: Dureté du matériau
б : Déviation standard de la hauteur des pics d’aspérité
[m] β : Moyenne des rayons de courbure des extrémités des aspérités [m] où E* : module élastique équivalent soit

Lorsque ψ est supérieur à 1, la déformation est plastique alors que s’il est inférieur à 0,6 la déformation est élastique. La surface réelle est alors donnée par les équations suivantes :
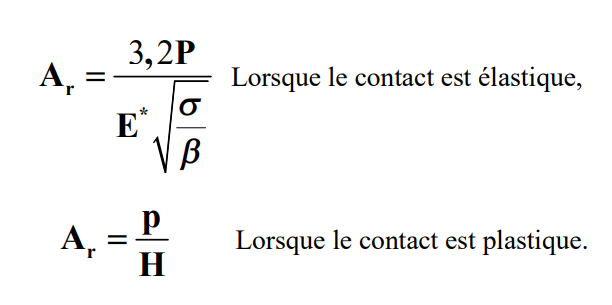
P : charge normale [N]
Aa : surface apparente de contact [m²]
Ar : surface réelle de contact [m²]
Notons que ces relations ne sont pas valables lorsqu’il y a aussi une force tangentielle et dans ce cas, la surface réelle est plus grande. L’estimation quantitative de ces phénomènes reste malgré tout difficile, car les aspérités doivent être de géométries très simples.
IV. Modèle de Bowden et Tabor
Le modèle proposé par Bowden et Tabor est le premier qui prend en compte l’importance de la plasticité des surfaces en contact, en relation avec des phénomènes d’adhésion (soudages) localisés au niveau des sommets des irrégularités surfaciques.
La rugosité surfacique devient alors la cause de fragmentation de l’aire apparente de contact en un grand nombre de microcontacts représentés par des jonctions adhésives individuelles qui se créent entre les aspérités appartenant aux deux surfaces en contact . Quel que soit le degré de finition et en dépit des apparences macroscopiques, aucune surface réelle n’est parfaitement plane.
Son état de surface se caractérise par une certaine rugosité qui est liée aux dimensions des aspérités microscopiques de la surface. Il est naturel de penser que la pression locale au niveau des microcontacts dépasse la limite élastique du matériau. Pour un matériau plastique idéal la pression au niveau du contact est saturée à une valeur H, et les aspérités se déforment alors de façon que
µ : coefficient de frottement
k : coefficient d’usure
D’après Bowden et Tabor, la force de frottement représente la force de cisaillement nécessaire pour rompre les jonctions adhésives formées entre les solides en contact. Si τ est la contrainte de cisaillement des jonctions, la force de frottement devient :
τ est la contrainte de cisaillement des jonctions Cette relation permet de retrouver la proportionnalité d’Amontons-Coulomb, en considérant des aspérités plastifiées.
Dans la compréhension des mécanismes physiques responsables du phénomène de frottement, l’équation au dessus est d’une importance majeure car, elle permet d’introduire les caractéristiques mécaniques des surfaces en contact, à savoir τ et H.
Elle n’est pas suffisante parce que la proportionnalité qu’elle exprime est obtenue sur la base d’une relation empirique entre l’aire réelle de contact Ar et la charge normale P.
Le frottement entre deux surfaces conduit essentiellement à trois processus physiques fondamentaux :
– le cisaillement des microjonctions adhésives,
– le labourage des surfaces par les aspérités,
– le cisaillement d’un film intercalaire entre les aspérités.
Si la pente des aspérités est suffisamment faible, le cisaillement des microjonctions adhésives est le processus dominant. Dans ces conditions le coefficient de frottement µ s’écrit :
En fait, ce n’est pas toujours le cas et Bowden et Tabor admettent que la présence d’une couche de contamination entre les aspérités des surfaces limite la contrainte de cisaillement et donc que τ < K .
Ainsi : τ = f.
Donc, le coefficient de frottement µ devient :
Avec 0 < f < 1, où f est un paramètre de contamination. L’application de la relation P = Arτ est évidente si l’on souhaite obtenir une force d frottement minimale